static point cloud map construction using multiresolution range images
算法流程图
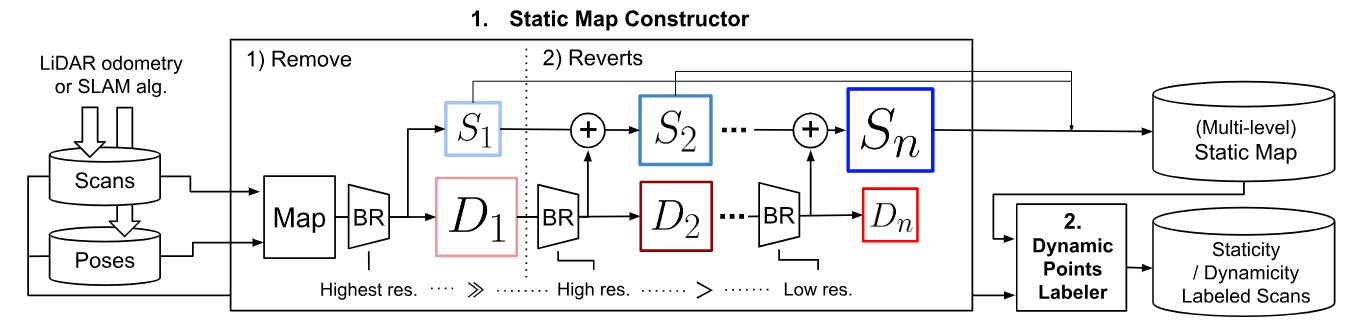 removert算法的思路很简单,就是将地图和scan都转换成rangeMat,然后根据每个rangeMat像素的区别判断点云是动态点云还是静态点云。
removert算法的思路很简单,就是将地图和scan都转换成rangeMat,然后根据每个rangeMat像素的区别判断点云是动态点云还是静态点云。
其中主要的模块是BR(batch removal),一开始的BR选取分辨率较高的rangeMat,这样可以保证动态点云应杀尽杀,后续用低分辨率的rangeMat恢复误杀点云。
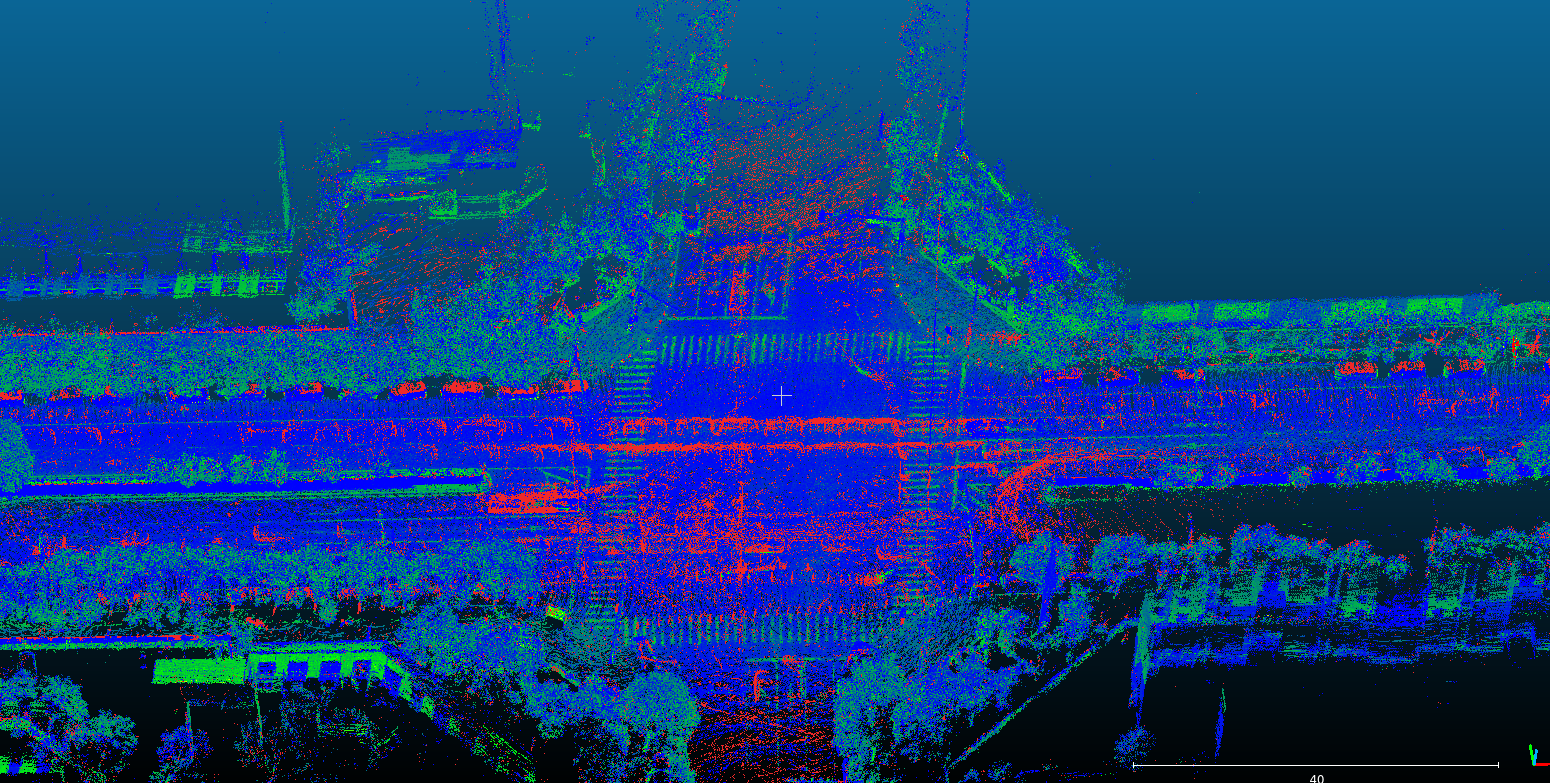
经过尝试,发现算法对于参数很敏感,对于不同的降采样率,不同的rangeMat分辨率,算法的性能会下降的比较厉害。
算法效果图
复现主要流程
- 原始代码没有revert模块
- 点云支持局部子图处理模式
- 可以支持kitti格式以及其他格式的数据
- 可以保存cleaned_scan,static_submap,dynamic_submap。