UKF and PF
无迹卡尔曼(UKF)
EKF的缺点
- EKF将系统的预测方程和观测方程局部线性化,因此对于线性化误差很敏感
- 对于高度非线性的系统,由于线性化忽视了高阶项,可能导致发散,系统变得不可靠
- 计算复杂的雅克比矩阵计算量大,并且有的系统模型参数多,很难得到解析解
UKF的改进
- 使用于非线性系统
- 对非线性的概率近似分布,没有线性化忽略高阶项
- 不需要计算Jacobian矩阵
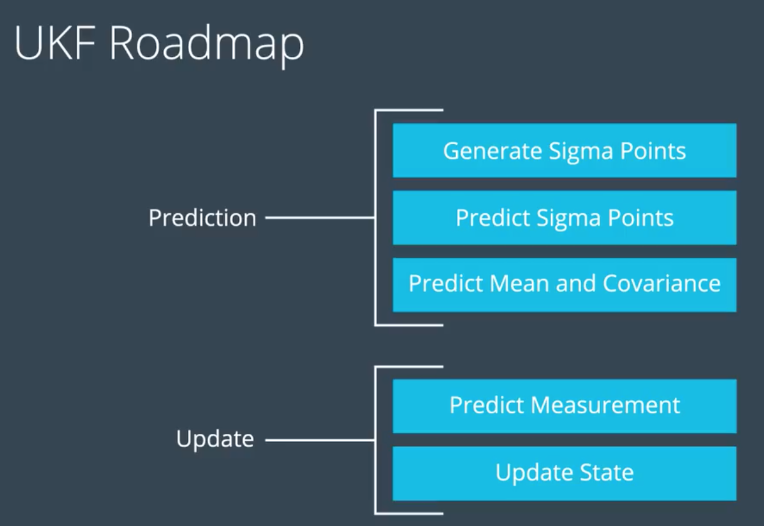
UKF的步骤
- 原高斯分布中按一定规则采样
- 采样点经过非线性变换
- 加权统计变换结果
UKF的一些细节
- 一般选取2n+1个采样点,其中n是变量的维数
- UKF只能处理轻度非线性的问题,也是需要后验分布能够被高斯分布良好的近似。所以UKF可以看成是后验线性化
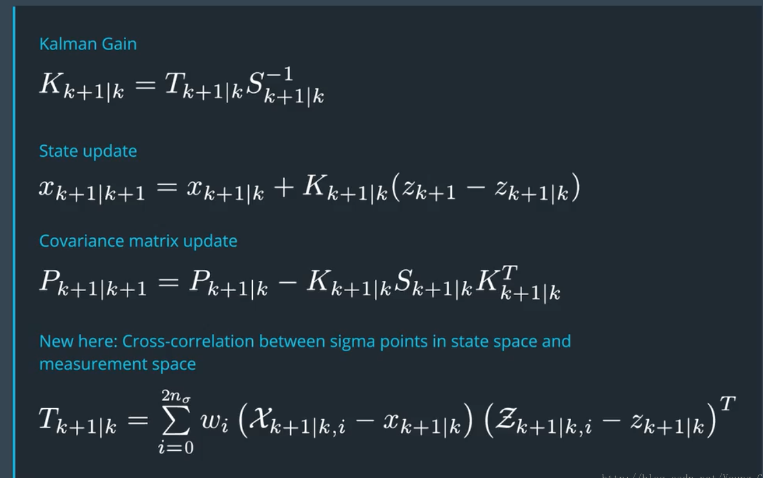
- UKF也需要计算卡尔曼增益
粒子滤波器(PF)
(参考链接)[https://www.zhihu.com/question/25371476]