将lio-sam前端特征提取利用多线程优化,将各个模块以及前端后端解耦
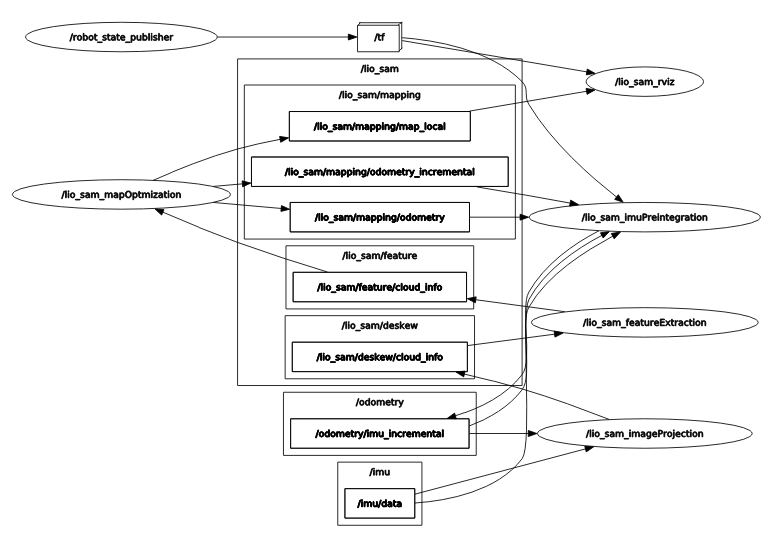
原始的lio-sam由以下四个文件构成:
imageProjection.cpp 负责点云去畸变和点云投影和按线数分割,以及点云的初值
featureExtraction.cpp 负责点云的特征提取,主要就是根据曲率判断角点和平面点
imuPreintegration.cpp 负责利用原始imu数据和雷达里程计数据,构建因子图输出高频imu预积分里程计
mapOptimization.cpp 负责利用带有初始位姿的特征点云做LM算法,以及将关键帧加入因子图,以及回环和可视化线程。
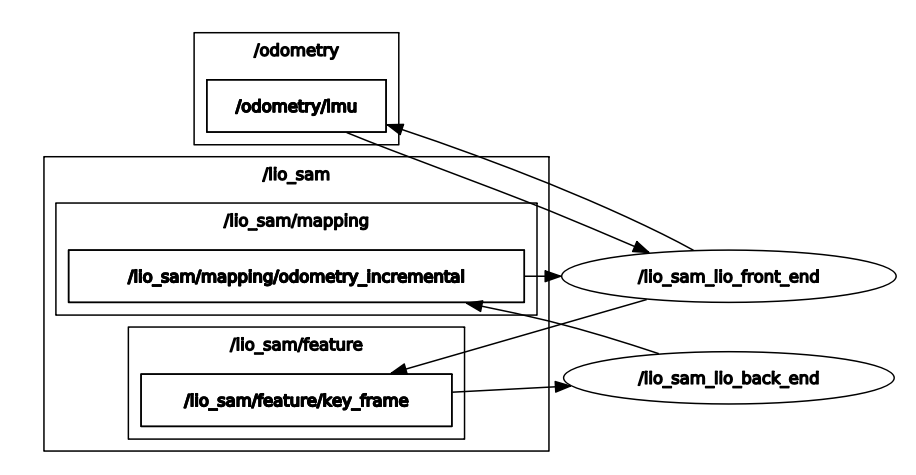
解耦后的lio-sam由两个文件构成 front_end.cpp 负责前端点云特征提取和imu预积分 前端利用多线程提取点云特征,imu预积分线程负责输出高频预积分里程计
back_end.cpp 后端模块负责点云LM算法和因子图优化,以及回环线程和可视化线程。所有的关键帧保存由一个新的类mapManager管理,后续可根据mapManager做二次开发。
解耦后的坐标系也采用新的方式,低频的雷达里程计维护map到base_link的变换,高频的imu维护odom到base_link的变换。因此,解耦后的map到odom是低频的,odom到base_link是高频的。这样可以缓解建图过程中里程计跳变的情况。